
منتجات


رافعة الجيب الكهربائية مناور ذراع الروبوت
وصف قصير:
يُطلق على الرافعة الجيبية الكهربائية مناور ذراع الروبوت أيضًا اسم الرافعة الكابولية ، وهي بنية بسيطة وآمنة وموثوقة. مناسبة لمناسبات النقل المكثفة. ولها العديد من المزايا مقارنة بأجهزة الرفع التقليدية الأخرى. الرافعة الكابولية عبارة عن معدات رفع تستخدم المصعد الكهربائي وسحب اليد المصعد، هو معدات رفع صغيرة مريحة وشعبية.

الرافعة الجيبية الكهربائية Robot Arm manipulator عبارة عن مناور طاقة خفيف الوزن، يتكون من عمود وذراع متأرجح وجهاز محرك دوار ومعدات رفع. مع الوزن الخفيف والامتداد الكبير والحركة ومعدات الرفع على الكابولي للحركة المستقيمة اليسرى واليمنى، و حمل الأشياء الثقيلة.
توفر الرافعة الجيبية الكهربائية مناور الذراع الآلي المساعدة في رفع المواد، مما يساعد المشغلين على إجراء مناولة وتكديس سلس وسريع ودقيق، وذلك لتحسين كفاءة الإنتاج وتقليل تكاليف العمالة.

معلومات عنا

نحن شركة متخصصة في تصنيع معدات التشغيل الآلي المخصصة. تشمل منتجاتنا جهاز إزالة الباليتات، وآلة التعبئة والاختيار، ومنصة التحميل، وتطبيق تكامل الروبوت، ومعالجات التحميل والتفريغ، وتشكيل الكرتون، وختم الكرتون، وموزع البليت، وآلة التغليف وحلول الأتمتة الأخرى لخط إنتاج التغليف الخلفي.
تبلغ مساحة مصنعنا حوالي 3500 متر مربع. يتمتع الفريق الفني الأساسي بخبرة متوسطها 5-10 سنوات في مجال الأتمتة الميكانيكية، بما في ذلك مهندسين للتصميم الميكانيكي. 1 مهندس برمجة، 8 عمال تجميع، 4 أشخاص لتصحيح الأخطاء بعد البيع، و10 عمال آخرين
مبدأنا هو "العميل أولاً، الجودة أولاً، السمعة أولاً"، ونحن نساعد عملائنا دائمًا على "زيادة القدرة الإنتاجية، وخفض التكاليف، وتحسين الجودة" ونحن نسعى جاهدين لنصبح المورد الأول في صناعة أتمتة الآلات.
مميزات نظام التعليق الكابولي
1.اختر ذراعًا من سبائك الألومنيوم أو ناتئًا فولاذيًا؛
2. تجميع وحدات، طول ناتئ قابل للاستبدال؛
3. زاوية دوارة من 0-360 درجة؛
4. سهل التركيب وسريع.


مزايا التعليق الكابولي
1. الكابولي هو جيل جديد من معدات الرفع الخفيفة للإنتاج الحديث. مع الموثوقية العالية لسلسلة القرع الكهربائية الحلقية، فهي مناسبة بشكل خاص للمسافات القصيرة والاستخدام المتكرر وعمليات الرفع المكثفة، وتتميز بالكفاءة العالية وتوفير الطاقة وتوفير المتاعب والمساحة الصغيرة وسهولة التشغيل والصيانة.
2. الكابولي أكثر مرونة وقدرة على التكيف على نطاق واسع، وهو عبارة عن معدات رفع طوارئ منفصلة ضرورية على خط الإنتاج الفعال والتلقائي، والذي يمكن أن يضمن التدفق السلس لخط الإنتاج.
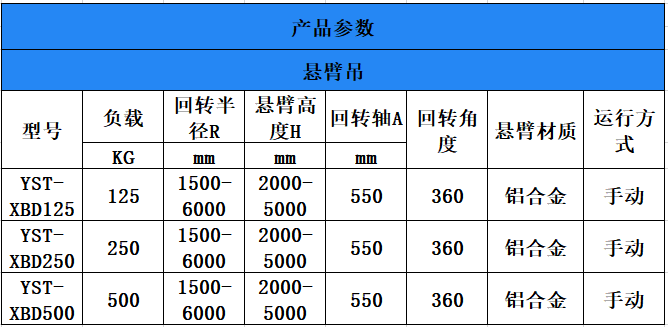
| نموذج | حمولة | ص / مم | همم | أ/مم | تناوب | مادة | عمل |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | سبائك الألومنيوم | يُسلِّم |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | سبائك الألومنيوم | يُسلِّم |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | سبائك الألومنيوم | يُسلِّم |
وصف المنتج
الروبوتات التعاونية هي شكل من أشكال الأتمتة الآلية المصممة للعمل بأمان جنبًا إلى جنب مع العمال البشريين في مساحة عمل مشتركة وتعاونية. في معظم التطبيقات، يكون الروبوت التعاوني مسؤولاً عن المهام المتكررة والوضيعية بينما يقوم العامل البشري بإكمال المهام الأكثر تعقيدًا والتي تتطلب تفكيرًا مكثفًا. تم تصميم الدقة ووقت التشغيل والتكرار للروبوتات التعاونية لاستكمال الذكاء ومهارات حل المشكلات للعامل البشري.
تختلف تصميمات الروبوتات التعاونية بشكل كبير عن نظيراتها من الروبوتات الصناعية. تتميز الروبوتات التعاونية بحواف مستديرة، وحدود للقوة، وأوزان خفيفة، وقد تم تصميمها أولاً وقبل كل شيء من أجل السلامة. تم تجهيز معظم الروبوتات التعاونية بسلسلة من أجهزة الاستشعار لتجنب الاصطدامات مع العمال البشريين، بالإضافة إلى بروتوكولات السلامة للإغلاق في حالة حدوث أي شكل من أشكال الاتصال غير المخطط له.
ميزات المنتج
1.اختر ذراعًا من سبائك الألومنيوم أو ناتئًا فولاذيًا؛
2. تجميع وحدات، طول ناتئ قابل للاستبدال؛
3. زاوية دوارة من 0-360 درجة؛
4. سهل التركيب وسريع.









