
منتجات


التعاون مناور الذراع الروبوتية
مميزات نظام التعليق الكابولي
1.اختر ذراعًا من سبائك الألومنيوم أو ناتئًا فولاذيًا؛
2. تجميع وحدات، طول الكابولي القابل للاستبدال؛
3. زاوية دوارة من 0-360 درجة؛
4. سهل التركيب وسريع.


مزايا التعليق الكابولي
1. الكابولي هو جيل جديد من معدات الرفع الخفيفة للإنتاج الحديث.مع الموثوقية العالية لسلسلة القرع الكهربائية الحلقية، فهي مناسبة بشكل خاص للمسافات القصيرة والاستخدام المتكرر وعمليات الرفع المكثفة، وتتميز بالكفاءة العالية وتوفير الطاقة وتوفير المتاعب والمساحة الصغيرة وسهولة التشغيل والصيانة.
2. الكابولي أكثر مرونة وقدرة على التكيف على نطاق واسع، وهو عبارة عن معدات رفع طوارئ منفصلة ضرورية على خط الإنتاج الفعال والتلقائي، والذي يمكن أن يضمن التدفق السلس لخط الإنتاج.
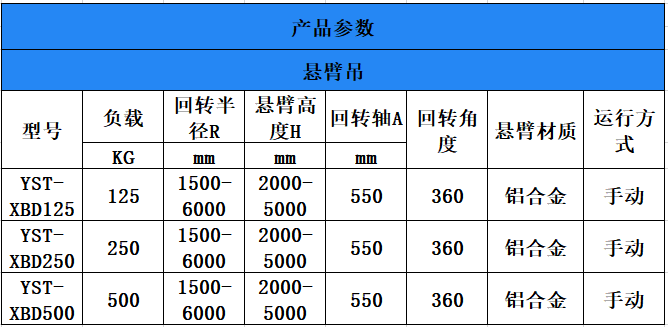
| نموذج | حمولة | ص / مم | همم | أ/مم | دوران | مادة | عمل |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | سبيكة المنيوم | يُسلِّم |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | سبيكة المنيوم | يُسلِّم |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | سبيكة المنيوم | يُسلِّم |
وصف المنتج
الروبوتات التعاونية هي شكل من أشكال الأتمتة الآلية المصممة للعمل بأمان جنبًا إلى جنب مع العمال البشريين في مساحة عمل مشتركة وتعاونية.في معظم التطبيقات، يكون الروبوت التعاوني مسؤولاً عن المهام المتكررة والوضيعية بينما يقوم العامل البشري بإكمال المهام الأكثر تعقيدًا والتي تتطلب تفكيرًا مكثفًا.تم تصميم الدقة ووقت التشغيل والتكرار للروبوتات التعاونية لاستكمال الذكاء ومهارات حل المشكلات للعامل البشري.
تختلف تصميمات الروبوتات التعاونية بشكل كبير عن نظيراتها من الروبوتات الصناعية.تتميز الروبوتات التعاونية بحواف مستديرة، وحدود للقوة، وأوزان خفيفة، وقد تم تصميمها أولاً وقبل كل شيء من أجل السلامة.تم تجهيز معظم الروبوتات التعاونية بسلسلة من أجهزة الاستشعار لتجنب الاصطدامات مع العمال البشريين، بالإضافة إلى بروتوكولات السلامة للإغلاق في حالة حدوث أي شكل من أشكال الاتصال غير المخطط له.
مواصفات المنتج
1.اختر ذراعًا من سبائك الألومنيوم أو ناتئًا فولاذيًا؛
2. تجميع وحدات، طول الكابولي القابل للاستبدال؛
3. زاوية دوارة من 0-360 درجة؛
4. سهل التركيب وسريع.









